Giao tiếp CAN STM32 – Thực hành cơ bản
2024-10-16
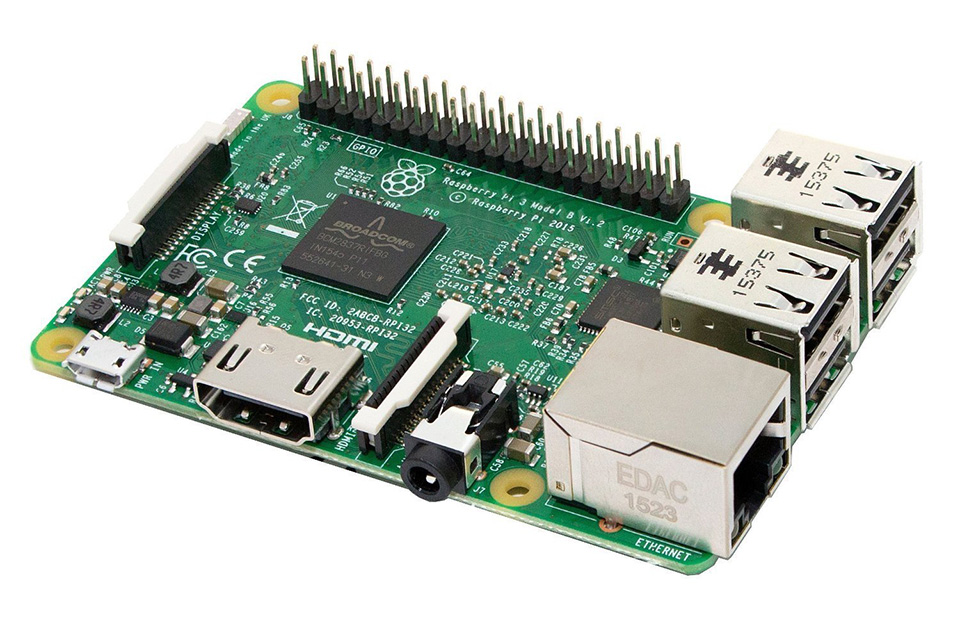
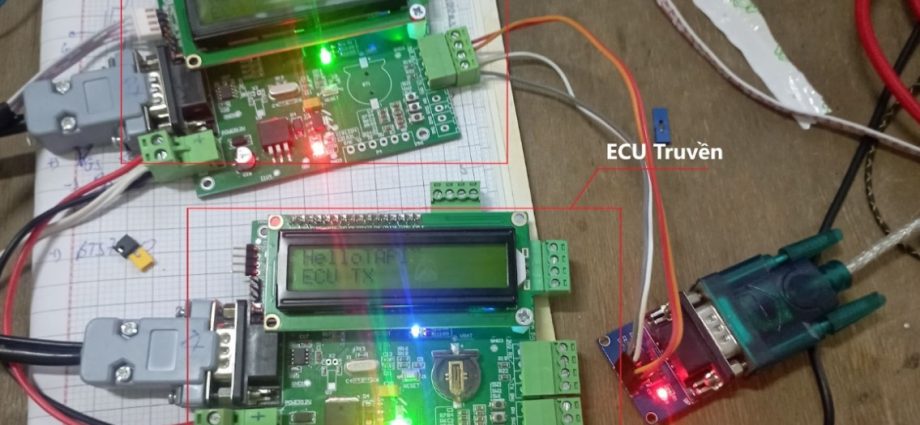
Nối tiếp nội dung tổng quan về Giao tiếp CAN, Bài viết này sẽ cung cấp các hướng dẫn cách thực hành cơ bản CAN bus với Vi điều khiển STM32. Nhiều dòng vi điều khiển STM32 tích hợp CAN Controller, chúng ta cần thêm phần cứng CAN Transceiver – MCP2551 để thử nghiệm. Hai vi điều khiển STM32 được thiết lập để giao tiếp bằng CAN thông qua module MCP2551 và UART được sử dụng để thể hiện dữ liệu lên màn hình máy tính.Continue Reading