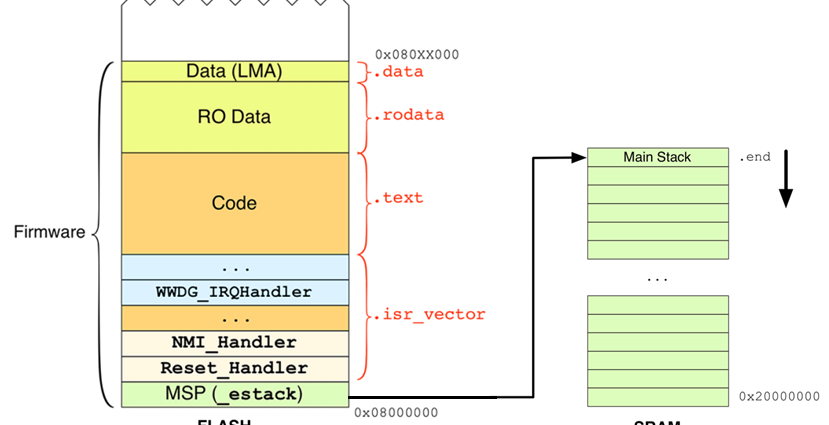
Vi xử lý ARM Cortex M3/4 và Quá trình khởi động của vi điều khiển STM32
2021-05-06
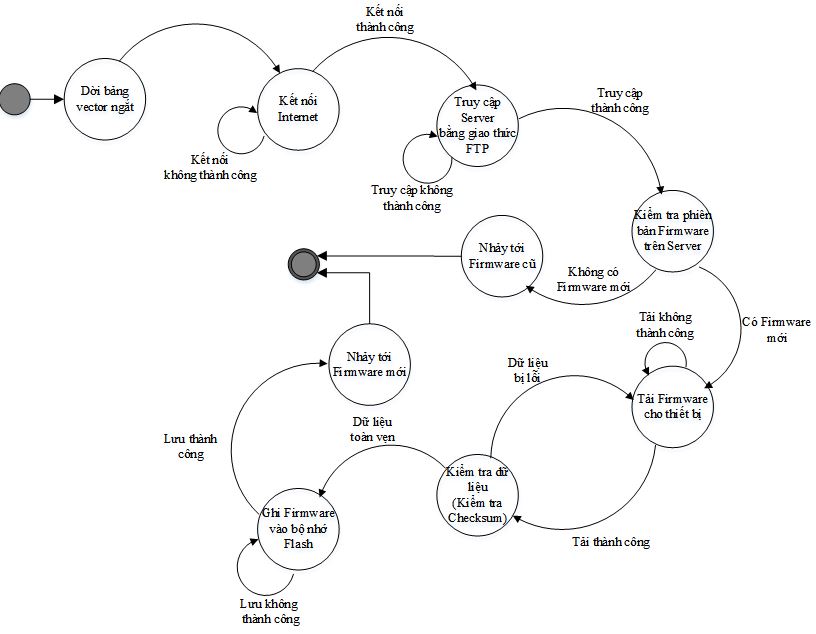
Dòng vi xử lý ARM Cortex M là một dòng vi xử lý được thiết kế tối ưu cho giá thành và năng lượng tiêu thụ của vi điều khiển, được sử dụng trong rất nhiều ứng dụng nhúng khác nhau. Trong bài viết này, mình sẽ cung cấp một số thông tin về Vi xử lý ARM Cortex M, quá trình khởi động của các vi điều khiển được thiết kế dựa trên vi xử lý này và việc áp dụng các kiến thức trên để thiết kế tính năng cập nhật chương trình từ xa. Continue Reading