Vì sao Vi điều khiển có nhiều chân nguồn
2020-06-03
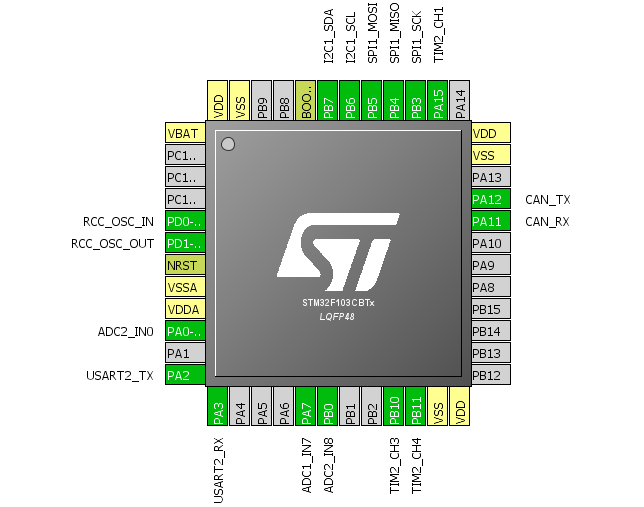
Chúng ta thường thấy ở mỗi con MCU hay có nhiều chân nguồn như Vcc, Vdd, Vee, Vss, Gnd,… Nhưng mỗi ký hiệu nó biểu thị cho nhiều chức năng của chân pin đó. Hôm nay mình chia sẻ 1 số vấn đề liên quan dẫn tới việc có nhiều cái ký hiệu pin nguồn như vậy.Continue Reading