Cập nhật chương trình từ xa trên vi điều khiển STM32 – Firmware Over The Air (FOTA) – P2
2020-02-19
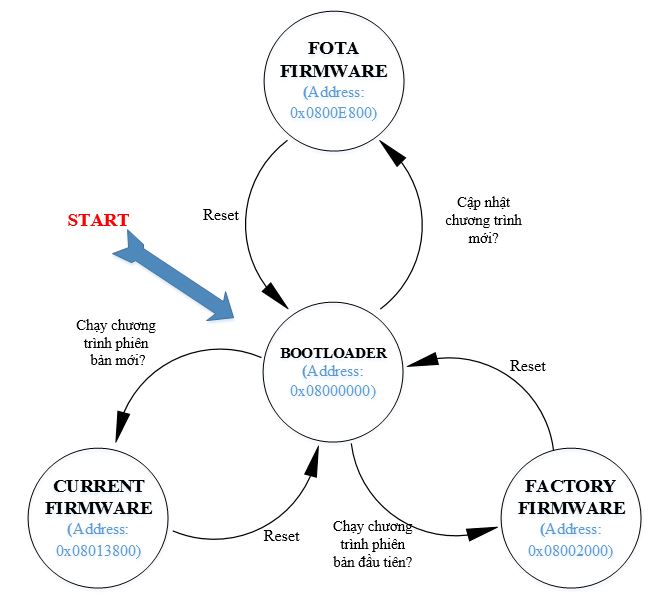
Nhiệm vụ của chương trình Bootloader là kiểm tra các điều kiện để lựa chọn thực thi một trong các chương trình: FOTA, Factory Firmware hoặc Current Firmware mỗi khi CPU reset. Vị trí của chương trình Bootloader thường được bắt đầu tại địa chỉ đầu tiên của bộ nhớ Flash, đây là địa chỉ mặc định sẽ được CPU thực thi sau khi reset. Với dòng vi điều khiển STM32 thì vị trí bắt đầu của bộ nhớ Flash là 0x0800 0000.Continue Reading