

Các sản phẩm khi sử dụng thực tế yêu cầu có sự ổn định cao trong suốt quá trình sử dụng. Một hệ thống có thể bị treo từ rất nhiều nguyên nhân như chương trình code chưa chặt chẽ, ngoại vi không phản hồi, nhiễu, tràn bộ nhớ… Lúc này các bạn cần khởi động lại hệ thống để mọi thứ có thể chạy lại từ đầu, kết hợp với việc báo lỗi để chúng ta tìm ra nguyên nhân và chỉnh sửa kịp thời. Watchdog timer là một chức năng của vi điều kiển giúp các bạn có thể phát hiện ra hệ thống bị treo và thực hiện reset. Các dòng micros STM32 chung có 2 chế độ watchdog timers (WDT):
- Independent Watchdog (IWDG)
- Window Watchdog (WWDG)
[HỌC ONLINE: LẬP TRÌNH VI ĐIỀU KHIỂN STM32, VI XỬ LÝ ARM CORTEX – M]
Clock options:
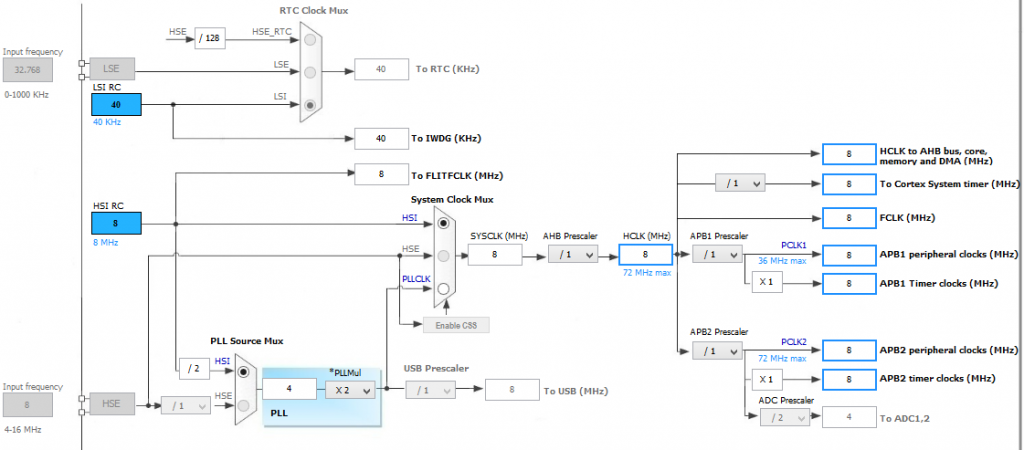

– External sources (ngoại)
+ HSE (High Speed External): Bộ dao động HSE chấp nhận input frequency từ 4 – 25 MHz. Nguồn clock chủ yếu là bộ dao động thạch anh hoặc mạch tạo tín hiệu xung (clock signal generating circuit).
+ LSE (Low Speed External): có chức năng tương tự như bộ dao động HSE nhưng chấp nhận input frequency bằng 32.768 kHz. LSE được sử dụng để cấp nguồn cho module Real Time Clock (RTC) bên trong STM32.
– Internal sources (nội)
+ HSI (High Speed Internal): nguồn clock cố định cấp cho HSI bằng 8Mhz
+ LSI (Low Speed Internal): input frequency dao động từ 30-60 kHz. Tần số phổ biến 40 kHz.
– PLL (Phase-Lock-Loop): bộ nhân tần số HSE hoặc HSI lên nhiều lần, nhằm tạo ra giá trị lớn hơn cho clock.
Independent Watchdog:
– Là bộ đếm giờ hoàn toàn độc lập vì nó có bộ clock riêng biệt và vẫn hoạt động ngay cả khi bộ clock chính của vi điều khiển fail.
– Nguồn clock cho IWDG đến từ LSI clock. Nó có tần số dao động khoảng 40 kHz (từ 30 đến 60 kHz).
– Chức năng: Reset lại MCU khi giá trị của down counter đếm xuống 0x00. Phù hợp trong ứng dụng cần reset lại STM32 MCU khi MCU bị treo.
– Các thanh ghi liên quan đến IWDG và bản đồ thanh ghi cho IWDG:
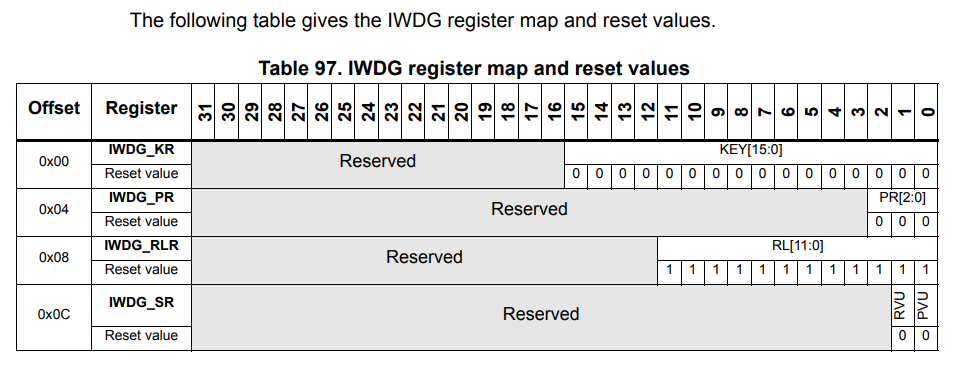

+ Key Register (IWDG_KR)
- = 0xCCCC: bắt đầu watchdog.
- = 0xAAAA: Nạp lại giá trị counter bằng với giá trị của thanh ghi IWDG_RLR.
- = 0x5555: Cho phép cấu hình thay đổi giá trị thanh ghi IWDG_PR và thanh ghi IWDG_RLR.
Tính năng bảo vệ: Việc ghi giá trị vào thanh ghi Prescaler IWDG_PR và thanh ghi Reload IWDG_RLR được bảo vệ bởi thanh ghi Key IWDG_KR. Để có thể thay đổi giá trị các thanh ghi được bảo vệ thì cần ghi giá trị 0x5555 vào thanh ghi IWDG_KR trước, sau đó mới khi ghi giá trị mong muốn vào thanh ghi IWDG_PR hoặc thanh ghi IWDG_RLR
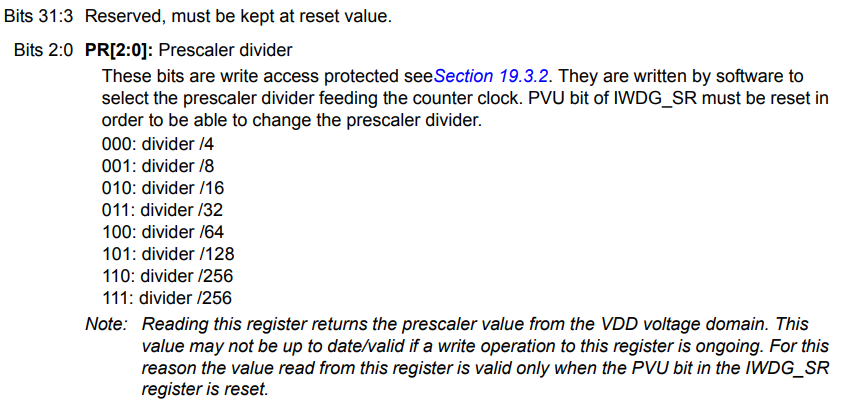
+ Prescaler Register (IWDG_PR)



+ Reload Register (IWDG_RLR)
- Định giá trị được đưa vào bộ đếm watchdog mỗi khi thanh ghi IWDG_KR được nạp giá trị 0xAAAA, sau đó bộ đếm watchdog sẽ bắt đầu đếm xuống từ giá trị này.
- Có thể định giá trị cho IWDG_RLR bằng cách lập trình hoặc thông qua việc cấu hình trên CubeMX.
– Các bước để cấu hình cho IWDG:
+ Khởi tạo giá trị cho thanh ghi IWDG_KR bằng 0x5555 để bỏ chế độ bảo vệ ghi đè lên 2 thanh ghi IWDG_PR và IWDG_RLR, cho phép thay đổi giá trị lên 2 thanh ghi đó.
+ Thay đổi giá trị IWDG_PR và IWDG_RLR tùy theo yêu cầu
+ Bật chế độ bảo vệ ghi đè lại bằng cách ghi 0xAAAA lên thanh ghi IWDG_KR
+ Bắt đầu IWDG bằng cách ghi 0xCCCC lên thanh ghi IWDG_KR
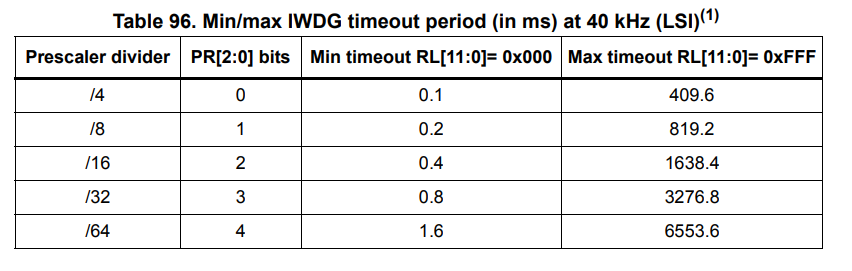
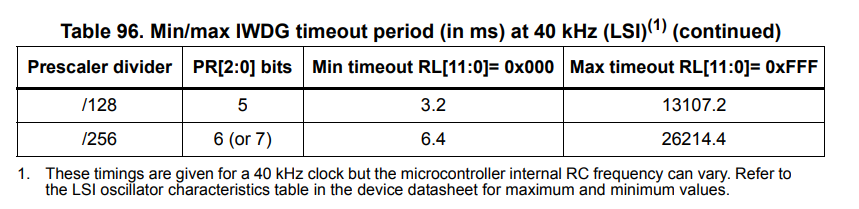
– Cách tính thời gian Timeout:


**Hướng dẫn chức năng WDT với CUBE MX :
Bước 1:
– Tạo project đổi trạng thái LED sử dụng IWDG trên phần mềm CubeMX


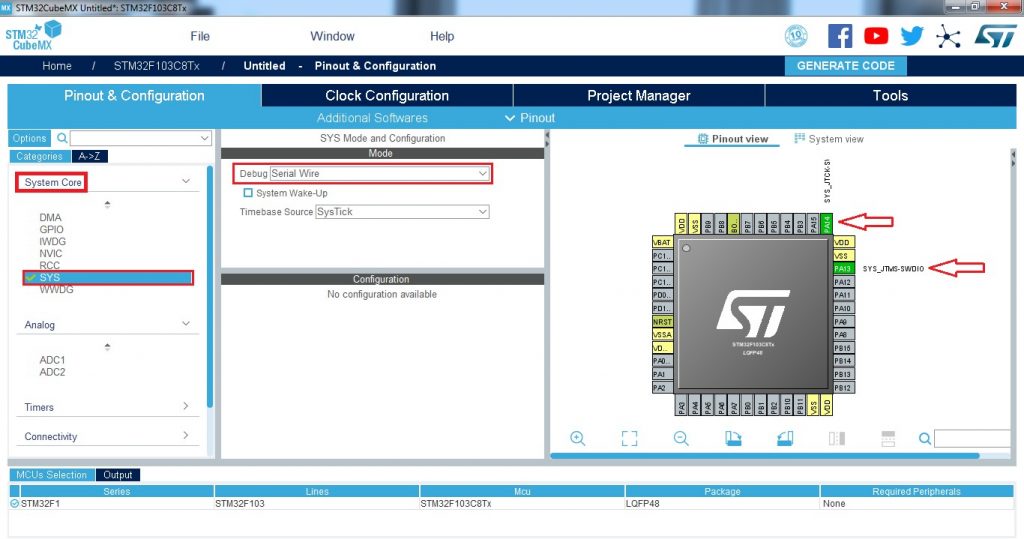
Bước 2:
Cấu hình việc nạp code ở module SYS sang Serial Wire.

Bước 3:
Ở chức năng IWDG kích chọn ô Activated.
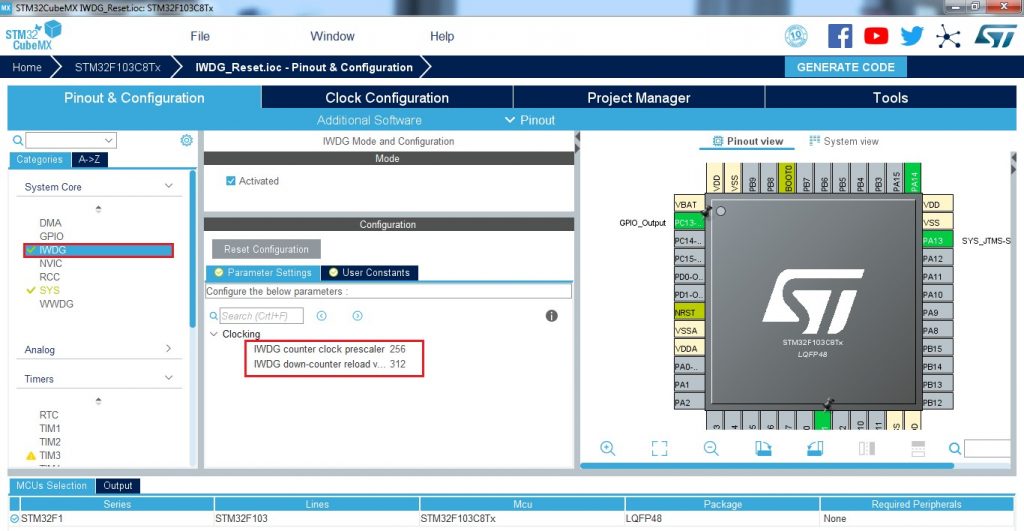

Thiết lập giá trị cho các thanh ghi IWDG_PR và IWDG_RLR:
Ví dụ ở đây chọn bộ chia /256 nên PR = 256 và cho RLR = 312. Áp dụng công thức (1), ta có Timeout = 2s.
Bước 4:
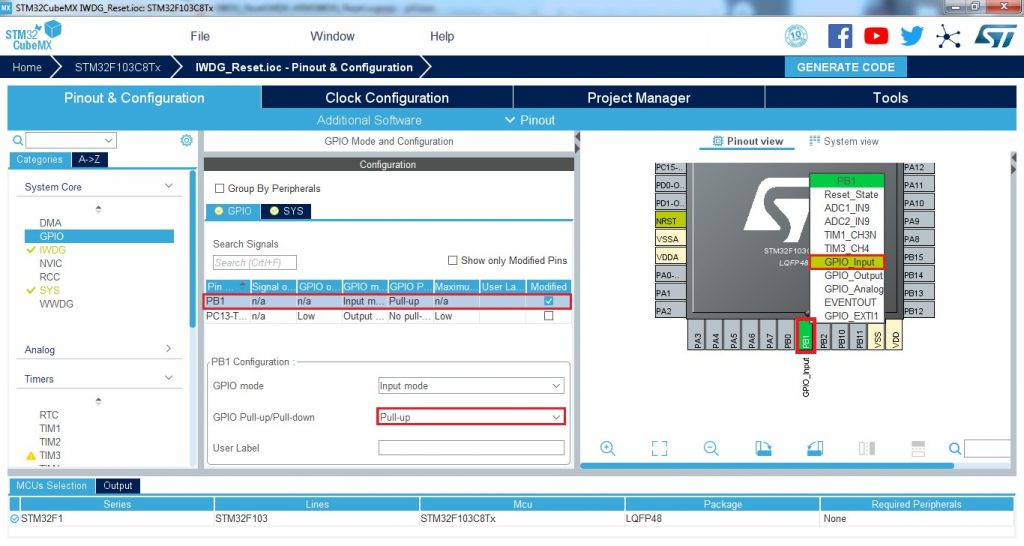
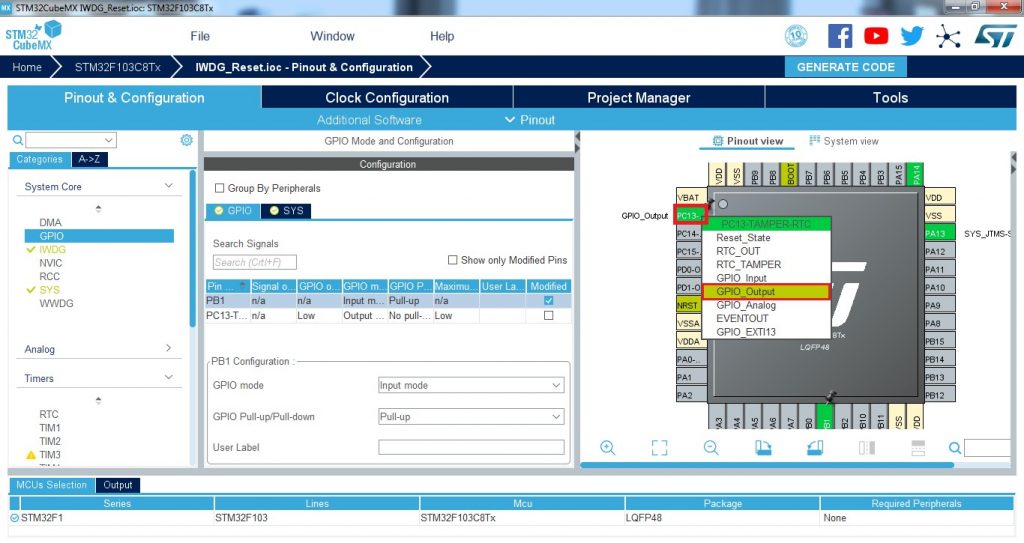
Chọn chân PB0 làm input, PC13 làm output.


Bước 5:
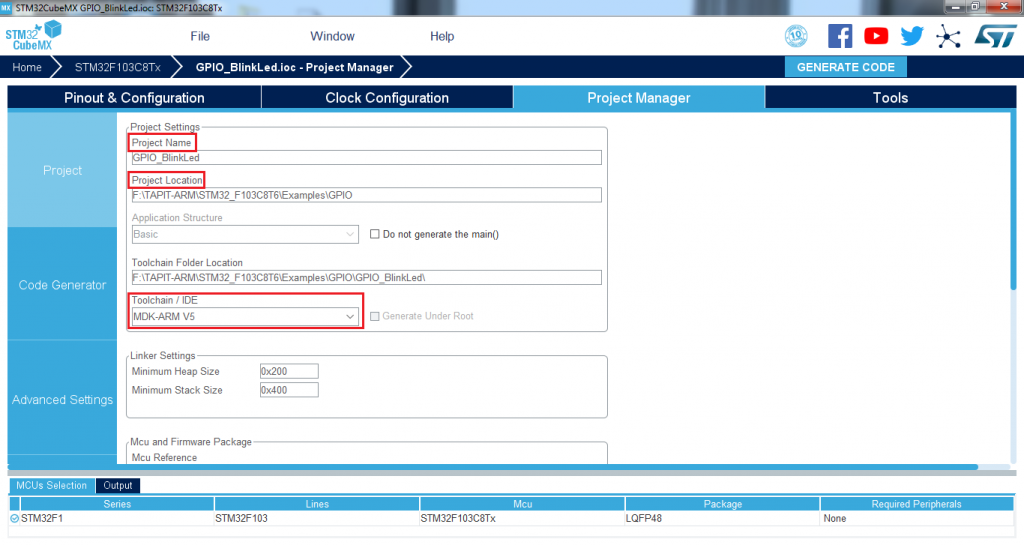
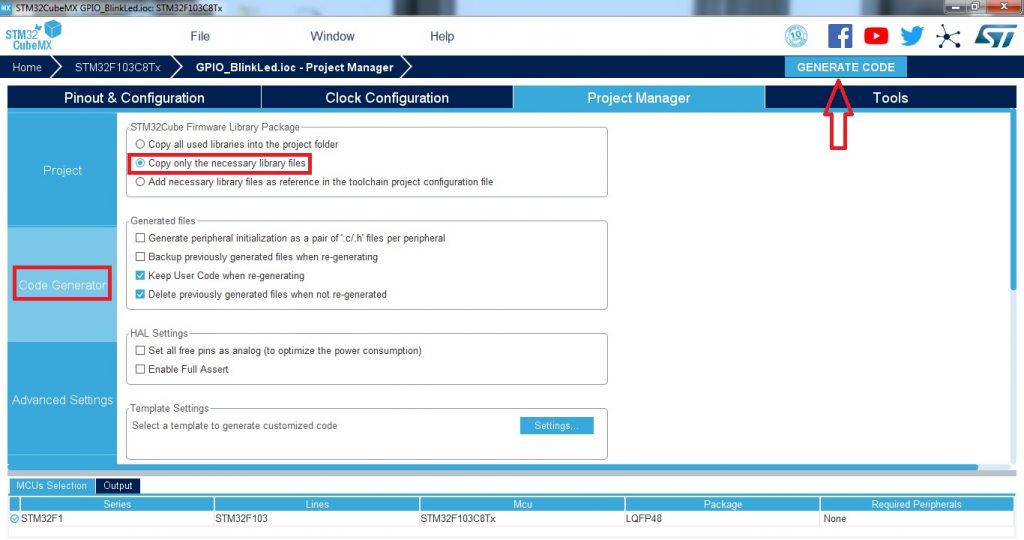
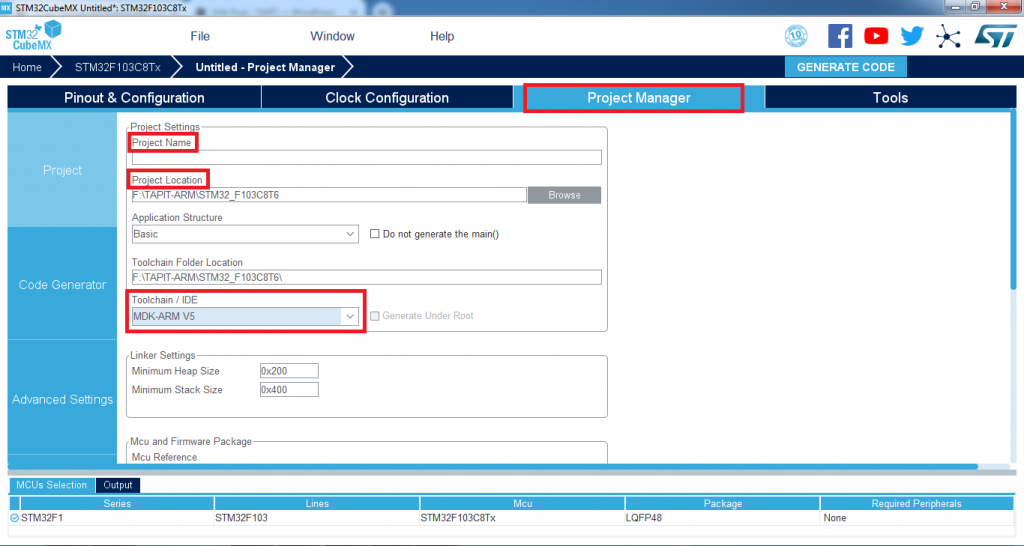
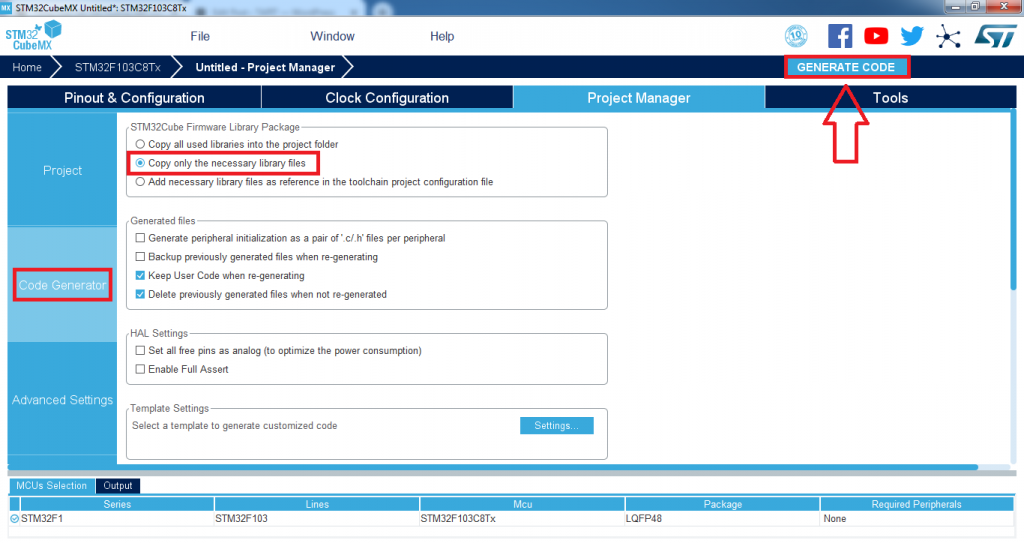
Sau khi hoàn thành các bước trên chuyển sang mục Setting để cài đặt việc tạo code cấu hình từ CubeMX
Bước 6:
Code example
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 |
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2019 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* --COPYRIGHT--, * Copyright (c) 2019, TAPIT Co., Ltd. * https://tapit.vn * ********************************* IWDG_Reset ********************************* * Description: Once the push button is pressed, the LED reverses the status to On and remains in that state for 2 seconds. Then MCU is reset and LED turns off * Version: 1.0 * Author: Hang Tran * Release: May 27, 2019 * Built with CubeMX Version 5.2.0 and Keil C Version 5.26.2 ******************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ IWDG_HandleTypeDef hiwdg; /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_IWDG_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_IWDG_Init(); /* USER CODE BEGIN 2 */ HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); IWDG->KR = 0xAAAA; // Writing 0xAAAA in the Key register prevents watchdog reset IWDG->KR = 0xCCCC; // Start the independent watchdog timer /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) == GPIO_PIN_RESET) { HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); IWDG->KR = 0xAAAA; HAL_Delay(500); } } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.LSIState = RCC_LSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK) { Error_Handler(); } } /** * @brief IWDG Initialization Function * @param None * @retval None */ static void MX_IWDG_Init(void) { /* USER CODE BEGIN IWDG_Init 0 */ /* USER CODE END IWDG_Init 0 */ /* USER CODE BEGIN IWDG_Init 1 */ /* USER CODE END IWDG_Init 1 */ hiwdg.Instance = IWDG; hiwdg.Init.Prescaler = IWDG_PRESCALER_256; hiwdg.Init.Reload = 312; if (HAL_IWDG_Init(&hiwdg) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN IWDG_Init 2 */ /* USER CODE END IWDG_Init 2 */ } /** * @brief GPIO Initialization Function * @param None * @retval None */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); /*Configure GPIO pin : PC13 */ GPIO_InitStruct.Pin = GPIO_PIN_13; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); /*Configure GPIO pin : PB1 */ GPIO_InitStruct.Pin = GPIO_PIN_1; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_PULLUP; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ |
Giải thích:
Một LED được kết nối với chân PC13 có trạng thái ban đầu là bật cho đến khi nút nhấn được kết nối với chân PB1 được nhấn. Một khi nút nhấn được nhấn thì LED đảo trạng thái qua tắt, và giữ nguyên trạng thái đó trong vòng 2 giây. Sau đó MCU bị reset và LED chuyển qua bật, giống như trạng thái lúc setup ban đầu.
Xem thêm: Tổng hợp các bài hướng dẫn Lập trình vi điều khiển STM32 tại đây.
Nhóm TAPIT ARM R&D